Using mechanisms inspired by nature to create new technological innovations is a signature of one Virginia Tech research team. The group led by Associate Professor Michael Bartlett has created an octopus-inspired adhesive, inspired by the shape of octopus suckers, that can quickly grab and controllably release challenging underwater objects.
Having the ability to grab and release these underwater objects like heavy rocks, small shells, and soft beads, and other debris could be a powerful tool for underwater salvage and even rescue operations. Their findings have been published in Advanced Science.
This work was performed with undergraduate researchers Austin Via, Aldo Heredia, and Daniel Adjei from Virginia Tech. Graduate Research Assistant Chanhong Lee was first author on the paper, reporting research supported by the National Science Foundation through the Designing Materials to Revolutionize and Engineer our Future program.
“I am fascinated with how an octopus in one moment can hold something strongly, then release it instantly. It does this underwater, on objects that are rough, curved, and irregular – that is quite a feat,” Bartlett said.
Getting a grip underwater
To overcome this longstanding challenge, Bartlett and his team looked to the shape of the octopus. Specifically, they looked at the outer structure of the octopus’s sucker, called the infundibulum. This inspired the researchers to create an adhesive that utilizes an elastic, curved stalk with an active, deformable membrane that changes shape for multi-surface adhesion.
The curved stalk attaches to large-scale curvatures while increasing adaptability to small-scale roughness. These mechanisms work in synergy to improve adhesion across multiple length scales.
This resulted in octopus-inspired adhesives that are 1,000 times stronger when activated compared to the easy release state. Importantly, this switch occurs within a fraction of a second, about 30 milliseconds. The octopus-inspired adhesives now achieve high attachment strength on diverse surfaces, including rough, curved, and irregular objects as well as in different fluids. With this new tool, a diver could hold a slippery object without applying excessive squeezing, also being able to snatch it quickly with rapid switching.
Grip and release of challenging underwater objects
Because octopus suckers are made of living tissue, they warp, expand and contract to match the job they are approaching. This gives the animal not only a stronger grip, but also a versatility to adapt its hold as it finds objects that are smooth or rough, angular or flat.
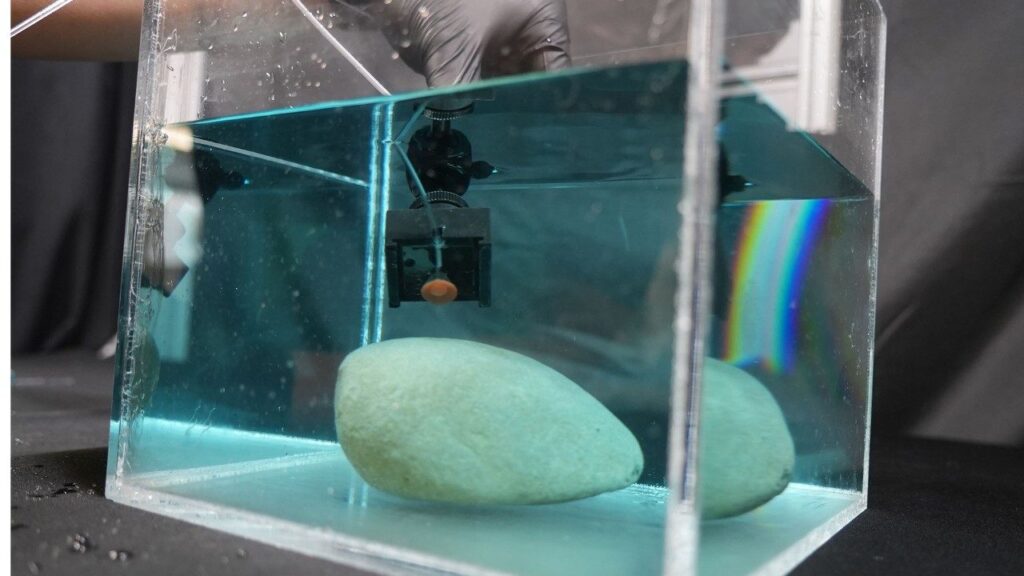
With the new octopus-inspired adhesive, research team members can pick up, hold, and release a wide range of challenging underwater objects, including soft and rigid materials that are flat, rough, and even curved.
This capability was demonstrated by constructing an underwater cairn, a carefully constructed pile of underwater rocks. Here, the rocks have various sizes, shapes, and surface roughness and must be picked up but also precisely released to keep the structure balanced. At the same time, they can also grab and release soft, jelly-like beads with ease.
“These types of manipulations are performed by an octopus as they arrange objects around their den,” said Lee. “This demonstration highlights the ability of the octopus-inspired adhesive to precisely manipulate difficult underwater objects.”
The materials also show reliable attachment over multiple cycles and over an extended period of time. In one experiment, the attachment force stayed constant over 100 cycles. In another test, the team held a rough, curved rock for more than seven days underwater, then released it on demand. Particularly in salvage applications where holding an object over an extended period of time, this could be critical.
Gripping like an octopus
Bartlett previously created Octa-Glove, published in Science Advances. Octa-Glove has octopus-inspired adhesives equipped with LIDAR sensors that detected objects nearby, attaching to the object with a strong but gentle bond without applying excessive force. After capture, the suckers can be disengaged on demand, releasing the captured object.
The glove could be a valuable tool for rescue divers, underwater archaeologists, user-assisted technologies, and in health care or other similar work that involves the need to have a firm grip on wet or underwater objects. This recently published research could increase the capacity of the glove, making the grip even stronger.
“We hope to utilize our new adhesive design to further improve Octa-Glove,” said Bartlett said. “Underwater environments present a long list of challenges, and this advance gets us over another hurdle. We’re now closer than ever to replicating the incredible ability of an octopus to grip and manipulate objects with precision, opening up new possibilities for exploration and manipulation of wet or underwater environments.”
Original study: DOI: 10.1002/advs.202407588
Source
Virginia Tech, press release, 2024-10-09
Supplier
Virginia State University
Virginia Tech
Share
Renewable Carbon News – Daily Newsletter
Subscribe to our daily email newsletter – the world's leading newsletter on renewable materials and chemicals